
Mª Mar Pérez Hernández
La incertidumbre del resultado de una medida refleja la falta de conocimiento sobre el verdadero valor del mensurando. El resultado de medir tal mensurando tras aplicar las correcciones debidas a efectos sistemáticos es todavía una estimación debido a la incertidumbre proveniente de los efectos aleatorios y a la falta de conocimiento completo de las correcciones aplicadas por los efectos sistemáticos.
En este artículo se pretende dar una breve descripción, acompañada de ejemplos, de los pasos a seguir en la determinación de incertidumbres.
The uncertainty of the result of a measurement reflects the lack of exact knowledge of the value of the measurand. The result of a measurement after correction for recognized systematic effects is still only an estimate of the value of the measurand because of the uncertainty arising from random effects and from imperfect correction of the result for systematic effects.
This article aims to give a brief description with examples of the steps in determining uncertainties.
1. Introducción
Una medida sin una indicación cuantitativa de la calidad del resultado es inservible, esta indicación es lo que denominaremos incertidumbre. La palabra “incertidumbre” significa duda, duda sobre la validez del resultado de una medida y refleja la imposibilidad de conocer exactamente el valor del mensurando.
La estimación de incertidumbres no es un trabajo sencillo en el que exista consenso. Se sigue pues trabajando y elaborando guías.
Gracias a un grupo de trabajo, en 1993 la ISO presentó la primera edición de la Guía para la expresión de la incertidumbre de la medida (GUM). En esta Guía se establecen reglas generales para evaluar y expresar la incertidumbre en la medición, no cómo puede utilizarse esta estimación para tomar decisiones. Para esto último está la norma UNE-EN ISO 14253-1:1999 Especificación geométrica de productos (GPS). Inspección mediante medición de piezas y equipos de medida. Parte 1: Reglas de decisión para probar la conformidad o no conformidad con las especificaciones. A pesar de que la existencia de esta guía nos ha facilitado mucho el trabajo no debe perderse de vista que la evaluación de la incertidumbre no es un proceso meramente matemático que debe realizarse después de cada medición, sino algo más complejo, tal como la propia guía aclara:
“Aunque la presente Guía proporciona un marco de actuación para la evaluación de la incertidumbre, este no puede nunca sustituir a la reflexión crítica, la honradez intelectual y la competencia profesional. La evaluación de la incertidumbre no es ni una tarea rutinaria ni algo puramente matemático; depende del conocimiento detallado de la naturaleza del mensurando y de la medición. La calidad y utilidad de la incertidumbre asociada al resultado de una medición dependen en último término del conocimiento, análisis crítico e integridad de aquellos que contribuyen a su evaluación”. (Guía para la expresión de la incertidumbre de medida, Sección 3.4.8)
Según la definición de la GUM la incertidumbre es el “parámetro asociado al resultado de una medida, que caracteriza la dispersión de los valores que razonablemente pueden ser atribuidos al mensurando”.
Los documentos base para la estimación de incertidumbres son los siguientes, siendo el primero, el documento de referencia fundamental:
- Evaluation of measurement data – Guide to the expression of uncertainty in measurement
- Evaluation of measurement data – Supplement 1 to the “Guide to the expression of uncertainty in measurement” – Propagation of distributions using a Monte Carlo method
- Evaluation of measurement data – Supplement 2 to the “Guide to the expression of uncertainty in measurement” – Extension to any number of output quantities
2. Causas de incertidumbre.
En la práctica de la medición existen muchas posibles fuentes de incertidumbre, entre ellas:
a) definición incompleta del mensurando;
b) realización imperfecta de la definición del mensurando;
c) muestra no representativa del mensurando;
d) conocimiento inadecuado de los efectos de las condiciones ambientales sobre la medición, o medición imperfecta de dichas condiciones ambientales;
e) lectura sesgada de instrumentos analógicos, por parte del operador;
f) resolución del instrumento de medida;
g) valores inexactos de los patrones de medida o de los materiales de referencia;
h) valores inexactos de constantes y otros parámetros obtenidos de fuentes externas, utilizados en el algoritmo de tratamiento de datos;
i) aproximaciones y suposiciones establecidas en el método y procedimiento de medición;
j) variaciones en la repetición de las observaciones del mensurando bajo condiciones aparentemente idénticas.
Estas fuentes no son necesariamente independientes, y algunas de ellas, a) a i), pueden contribuir a la fuente j).
La incertidumbre instrumental es la componente de la incertidumbre de medida que procede del instrumento o sistema de medida utilizado y se obtiene mediante calibración de éste. En el caso de un patrón primario suele obtenerse a partir de la participación en comparaciones clave interlaboratorios.
La evaluación de la incertidumbre asociada a una medición es fundamental para, posteriormente, poder comprobar la conformidad de un producto o bien con las especificaciones que le sean de aplicación, ya sean de diseño, legales, o de otro tipo (UNE-EN ISO 14253-1).
3. Incertidumbre y probabilidad.
Para poder empezar a evaluar de una forma operativa la incertidumbre de una medida, deben verse los valores obtenidos en una medición desde el punto de vista de la teoría de la probabilidad.
El conjunto de todos los posibles resultados de un experimento aleatorio se denomina espacio muestral. La función que asigna un número real a cada elemento del espacio muestral es la variable aleatoria. El rango de esta función es el conjunto de todos los posibles valores de esta variable.
En nuestro caso estamos interesados en conocer una magnitud X después de la realización de un experimento. Denominando x a cada uno de los elementos del espacio muestral, definiremos como función densidad de probabilidad pdf la función f(x) en el rango de (0,∞) tal que la probabilidad infinitesimal dp de que el valor de la variable se halle entre los valores x y x+dx es f(x) dx. De aquí que la probabilidad de que una variable aleatoria tome valores ientre los límites xa y xb es:

La función de distribución de una magnitud medida describe el conocimiento que tenemos de la realidad de esa magnitud.
Para nuestro propósito, los parámetros más interesantes de la función de distribución son: la esperanza matemática o el valor esperado, la varianza y la covarianza en el caso de dos magnitudes relacionadas entre sí.
Dada una magnitud Xi cuya función de densidad de probabilidad sea f(xi) se define el valor esperado E(Xi) como:

La varianza de una variable aleatoria o de una distribución de probabilidad se define como:

Como propiedades podemos destacar que la esperanza matemática es un operador lineal y la varianza no lo es.
El mejor estimador de Xi será aquel que minimice la expresión:

respecto a xi’. El mínimo aparece cuando ![]()
Por otro lado la varianza de una función de densidad nos da idea de la dispersión de los valores. La incertidumbre se define como la raíz cuadrada positiva de la varianza.
4. Evaluación de las incertidumbres de medición
Siguiendo la GUM podemos agrupar las componentes de incertidumbre en dos categorías según el método de evaluación, “tipo A” y “tipo B”. La clasificación en tipo A y tipo B no implica ninguna diferencia de naturaleza entre las componentes de estos tipos, consiste únicamente en dos formas diferentes de evaluar las componentes de incertidumbre, y ambos se basan en distribuciones de probabilidad.
Evaluación tipo A
La evaluación tipo A de la incertidumbre se utiliza cuando se realizan n observaciones independientes entre sí de una de las magnitudes de entrada Xi bajo las mismas condiciones de medida.
En la mayor parte de los casos, la mejor estimación disponible de la esperanza matemática q de una magnitud q que varía al azar, de la que se han obtenido n observaciones independientes qk en las mismas condiciones de medida, es la media aritmética de las n observaciones:

Los valores de las observaciones individuales qk difieren entre sí debido a variaciones aleatorias de las magnitudes de influencia o de efectos aleatorios. La varianza σ2 de la distribución de probabilidad de q se estima mediante la varianza experimental de las observaciones, y viene dada por:

Esta estimación de la varianza y su raíz cuadrada s(qk), denominada desviación típica experimental, caracterizan la variabilidad de los valores observados qk o, más específicamente, su dispersión alrededor de su media Σ.
La mejor estimación de la varianza de la media ![]() viene dada por la varianza experimental de la media:
viene dada por la varianza experimental de la media:

que, junto con la desviación típica experimental de la media, s(q), cuantifican la bondad con que q estima la esperanza matemática q.
Para una magnitud de entrada Xi determinada a partir dei n observaciones repetidas e independientes, la incertidumbre típica de su estimación es ![]() y se denomina incertidumbre típica de tipo A.
y se denomina incertidumbre típica de tipo A.
En algunas situaciones pueden utilizarse otros métodos estadísticos, como el método de mínimos cuadrados o el análisis de la varianza. Por ejemplo, la utilización de modelos de calibración basados en el método de mínimos cuadrados es útil para evaluar las incertidumbres procedentes de variaciones aleatorias, a corto y a largo plazo, de los resultados de comparaciones de patrones materializados de valor desconocido, tales como bloques o masas patrón, con patrones de referencia de valor conocido. Las componentes de la incertidumbre pueden evaluarse en estos casos por análisis estadístico de los datos obtenidos utilizando diseños experimentales consistentes en secuencias de mediciones del mensurando para un cierto número de valores diferentes de las magnitudes de las que este depende.
Evaluación tipo B
La evaluación tipo B de la incertidumbre típica se utiliza cuando la estimación xi de una magnitud de entrada Xi no ha sido obtenida a partir de observaciones repetidas. La varianza estimada asociada u2(xi), o la incertidumbre típica u(xi), se obtiene entonces mediante decisión científica basada en la información disponible acerca de la variabilidad posible de Xi. El conjunto de la información puede comprender:
- Resultados de medidas anteriores;
- La experiencia o el conocimiento general del comportamiento y propiedades de los materiales y los instrumentos utilizados;
- Las especificaciones del fabricante;
- Los datos suministrados por certificados de calibración u otros certificados;
- La incertidumbre asignada a valores de referencia procedentes de libros y manuales.
Según la fuente de la que se obtiene esa incertidumbre tipo B, ésta se estimará de distinta manera. Algunos ejemplos de evaluación tipo B son:
Incertidumbre debida al patrón o instrumento calibrado
La incertidumbre típica se obtiene dividiendo la incertidumbre expandida dada en el certificado de calibración del patrón por el factor de cobertura indicado:

Incertidumbre debida a la resolución
Una de las fuentes de incertidumbre de un instrumento es la resolución de su dispositivo indicador, si se trata de un instrumento digital, o la incertidumbre debida a la resolución de lectura, si se trata de un instrumento analógico. En el caso del instrumento analógico la resolución depende del operador o de los medios que éste emplee en la lectura (amplificación óptica, p. ej.).
Si la resolución del dispositivo indicador es δx, el valor de señal de entrada que produce una indicación dada X puede situarse con igual probabilidad en cualquier punto dentro del intervalo que va de (X-δx/2) a (X+δx/2). La señal de entrada puede describirse entonces por medio de una distribución rectangular de rango δx y varianza u2=(δx)2/12, lo que supone una incertidumbre típica para cualquier indicación de:

Incertidumbre debida a la deriva del patrón
La deriva de un patrón no es fácil de determinar en muchos casos, y es un parámetro independiente y característico de cada patrón. Su valor depende, entre otros factores, de las condiciones de uso y mantenimiento, de la frecuencia de utilización, de la exactitud del instrumento, del periodo entre calibraciones, etc.
Para su cálculo, se puede partir del histórico de calibraciones sucesivas del patrón y estimar una variación del valor certificado δp. Para la evaluación de la incertidumbre podremos aplicar un tipo de distribución rectangular o triangular según los conocimientos que tengamos del histórico del patrón.
Se darán más ejemplos calculados al final del texto.
5. Estimación de la incertidumbre combinada y la expandida. Factor de cobertura, k
Una medición física, por simple que sea, tiene asociado un modelo que se aproxima al proceso real. El modelo físico se representa mediante un modelo matemático que en muchos casos supone aproximaciones..
5.1. Ley de propagación de incertidumbres, LPI. Incertidumbre combinada
En la mayor parte de los casos, el mensurando Y no se mide directamente, sino que se determina a partir de otras N magnitudes X1, X2, …, XN , mediante una relación funcional f:.

La función f no expresa tanto una ley física como el proceso de medida y debe contener todas las magnitudes que contribuyen al resultado final, incluyendo las correcciones, aunque estas sean de valor nulo, para poder considerar las incertidumbres de dichas correcciones.
En principio, mediante evaluación tipo A o evaluación tipo B, seríamos capaces de conocer las funciones de distribución de cada una de las magnitudes de entrada y podría derivarse de aquí la función de distribución de la magnitud indirecta.
Teniendo en cuenta el desarrollo en serie de Taylor de primer orden en torno al valor esperado, gracias a las propiedades de la varianza podemos obtener la ley de propagación de incertidumbres, la cual facilita la estimación de éstas.


Los términos ci , cj son los coeficientes de sensibilidad e indican el peso que supone cada una de las distintas magnitudes de entrada en la magnitud de salida, representada por la función de medición. El segundo término es el término de covarianza en el que aparece la influencia de unas magnitudes de entrada sobre otras, en el caso de que estas estén correlacionadas. Si las magnitudes de entrada son independientes puede simplificarse la ecuación, desapareciendo el segundo término y quedando únicamente el primero.
Ejemplo 1:
LPI para modelos de la forma:

En este caso obtenemos

Un ejemplo de este modelo puede ser el módulo de elasticidad de un metal. E = σ/ε

Cuando no es posible escribir el modelo de medición de una forma explícita, los coeficientes de sensibilidad no pueden ser calculados de forma analítica, sino de forma numérica, introduciendo pequeños cambios xi + Δxi en las magnitudes de entrada y observando los cambios que se producen en las magnitudes de salida.
5.2. Limitaciones de la LPI
La ley de propagación de incertidumbres se puede aplicar cuando:
- Únicamente aparezca una magnitud de salida en el modelo matemático.
- El modelo matemático sea un modelo explícito, es decir, Y = f (Xi).
- Puedan ser calculadas la esperanza matemática, las incertidumbres típicas y las incertidumbres mutuas de las magnitudes de entrada.
- El modelo sea una buena aproximación a un desarrollo lineal en torno al mejor estimador de las magnitudes de entrada.
Cuando se trata de modelos no lineales se puede realizar la aproximación de segundo orden de la serie de Taylor, o incluso obtener los valores de esperanza matemática y varianza sin aproximaciones, directamente, soluciones mucho más complejas matemáticamente que la ley de propagación de incertidumbres.
Después de la elaboración de la guía GUM, se ha trabajado en guías suplementarias a ésta, para la evaluación de incertidumbres por otros métodos. Una de ellas ha incidido en calcular la incertidumbre mediante el método de Montecarlo.
La idea básica de este método, útil tanto para modelos lineales como para modelos no lineales, es que suponiendo un modelo Y = f (Xi), donde todas las magnitudes de entrada puedan ser descritas por sus funciones de distribución, puede emplearse un algoritmo matemático programado para generar una secuencia de valores τi = (x1, …….xN) donde cada xi es generado de forma aleatoria a partir de su función de distribución (extracciones de su función de distribución). El valor de y1 obtenido de cada secuencia τi es calculado empleando el modelo de medición, repitiéndose el proceso un gran número de veces, del orden de 105 ó 106. Este elevado número de repeticiones permite obtener una función de distribución para la magnitud y, y el cálculo de su esperanza matemática y su desviación típica de forma matemática, lo que nos conducirá a los resultados de mejor estimador e incertidumbre típica combinada asociada.
En este proceso realmente no se emplean los resultados de la medición de los parámetros de entrada para dar un resultado de la medición, sino para establecer con ellos las funciones de distribución de las magnitudes de entrada y poder generar de forma aleatoria valores de la magnitud función de dichas magnitudes de entrada. Como se trata de una generación automatizada, pueden generarse muchísimos más valores que si se realizase la medición realmente y con todos ellos encontrar la función de distribución de la magnitud que es función de las magnitudes de entrada. Conocida ésta matemáticamente, se obtienen los resultados y las incertidumbres asociadas.
5.3. Incertidumbre expandida
La incertidumbre típica combinada sirve para caracterizar la calidad de las medidas. En la práctica lo que se necesita es conocer el intervalo dentro del cual es razonable suponer, con alta probabilidad de no equivocarse, que se encuentran los infinitos valores que pueden ser “razonablemente” atribuidos al mensurando. Nos podríamos preguntar si podríamos emplear la incertidumbre típica combinada para definir dicho intervalo (y-u, y+u). En este caso, la probabilidad de que el valor verdadero del mensurando esté comprendido en el intervalo (y-u, y+u) es baja ya que, en el supuesto de que la función de distribución del mensurando “y” sea una función normal, estamos hablando de un 68,3 %.
Para aumentar la probabilidad hasta valores más útiles de cara a la toma posterior de decisiones, podemos multiplicar la incertidumbre combinada por un número denominado “factor de cobertura” kp y emplear el intervalo (y-uc(y) kp’ y+ uc(y) kp).
El producto kp uc(y) = Up se denomina incertidumbre expandida, donde kp es el factor de cobertura para un nivel de confianza p.
Matemáticamente esto quiere decir que:

De donde el área de la función de densidad asociada a Y dentro de este intervalo es:

El intervalo que nos interesa conocer es ( y – Up’ y + Up ).
La relación entre p y kp depende, evidentemente, de la función de densidad f(Y) que se obtiene de la información acumulada durante el proceso de medición.
5.4. Tipos de distribuciones
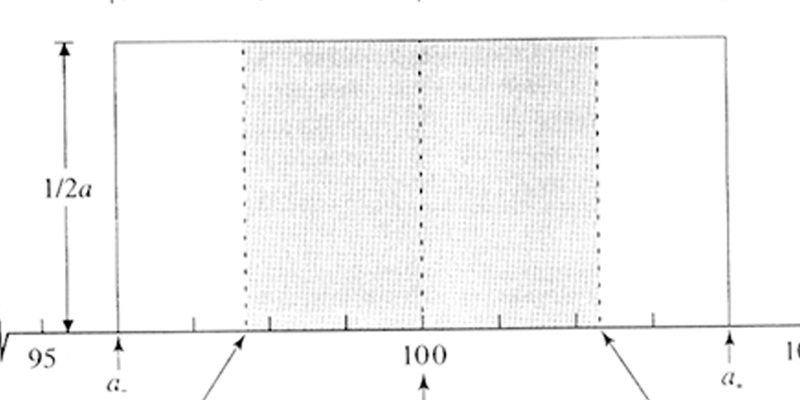
5.4.1. Distribución rectangular

Para un nivel de confianza p calculamos la integral de la función de distribución:


La desviación típica es:

Para calcular el factor de cobertura:

Operando se obtiene:

Ejemplo:
Dada una cierta magnitud t se sabe que viene descrita por una distribución rectangular simétrica, de extremos 96 y 104. Determinar el factor de cobertura y la incertidumbre expandida para un nivel de confianza del 99 %.
En este caso tenemos que a = 4, μ = 100, y σ = 2,31, y que para un nivel de confianza del 99 % el factor de cobertura es 1,71. Entonces, la incertidumbre expandida es:
U99 = kp u = 1,71×2,31=3,949
5.4.2. Distribución triangular

Para un nivel de confianza p se calcula la integral de la función de densidad:


Como la desviación típica es:


Operando se obtiene:

5.4.3. Distribución normal
En la mayor parte de los procesos de medición la distribución que describe
mejor lo observado es la distribución normal.

La distribución normal de μ = 0 y σ = 1 se denomina distribución normal tipificada o estándar.
La integración necesaria para la determinación de los intervalos de confianza es más complicada. No obstante en el caso de la distribución normal estándar existen tablas que permiten realizar de forma sencilla ese cálculo.
La forma de obtener los intervalos de confianza es mediante la tipificación. Si tenemos una variable o magnitud Y que se distribuye según una N(µ,σ), se define una variable normal tipificada como 
La integración de la distribución normal tipificada N(0,1) está en las tablas. A partir de ellas se determinan los intervalos de confianza.
Ejemplo:
Si para un nivel de confianza p, el intervalo de confianza que se define para una distribución N(0,1) es (-kp, kp); como Z es una distribución N(0,1):



En una distribución normal el factor de cobertura kp, para un nivel de confianza p es:

La incertidumbre expandida se calcula según Up (y) = kp uc (y).
5.4.4. Distribución t-Student
Sea Z una variable aleatoria de esperanza µz y desviación típica σz de la que se realizan n observaciones, estimándose un valor medio z y una desviación estándar experimental s(z).
Se puede definir la siguiente variable cuya distribución es la t-Student con ν grados de libertad

El número de grados de libertad es ν = n –1 para una cantidad estimada mediante la media aritmética de n observaciones independientes.
Si se usan las n observaciones independientes para realizar un ajuste mediante mínimos cuadrados de m parámetros, el número de grados de libertad es ν = n -m
Para una variable t-Student con ν grados de libertad, el intervalo para el nivel de confianza p es (–tp (ν), tp (v)).
El factor tp (ν) se encuentra en las tablas de la t de Student.
Ejemplo:
Supongamos que el mensurando Y es simplemente una magnitud que se estima por la media aritmética X de n observaciones independientes, siendo s(X) la desviación típica experimental:
La mejor estimación de Y es y = X con incertidumbre asociada uc (y) = s(X)
La variable  se distribuye según la t-Student. Por lo tanto:
se distribuye según la t-Student. Por lo tanto:



El factor de cobertura es tp (ν) y la incertidumbre expandida Up (ν) = tp (ν) uc (y).
5.5. Determinación de la incertidumbre expandida después de la medición
El problema que se nos plantea es determinar la incertidumbre expandida después de realizada una medición.
Si se trata de una medida directa, podemos actuar de distintas formas:
– Incertidumbre determinada según evaluación tipo A de la incertidumbre
El factor de cobertura para un nivel de confianza dado se obtiene a partir de la distribución t de Student con n-1 grados de libertad, siendo n el número de mediciones, o bien de la distribución normal, si el número de reiteraciones es suficientemente grande.
– Incertidumbre determinada si la distribución Y es rectangular, centrada en el estimador y
El factor de cobertura se obtiene de la distribución rectangular.
Si se trata de calcular la incertidumbre expandida para una medida indirecta resulta algo complicado calcular la función de distribución, la cual debe realizarse por métodos analíticos o numéricos especiales. Pero podemos pensar en simplificar:
Una primera aproximación sería calcular la función de distribución de probabilidad por convolución de las distribuciones de probabilidad de las magnitudes de entrada.
Una segunda aproximación sería suponer la medida indirecta como función lineal de las magnitudes de entrada

5.5.1. Teorema del límite central
El teorema del límite central en sus diferentes versiones asegura que la suma de variables aleatorias independientes y equidistribuídas converge a una normal. Sobre el papel la convergencia es comúnmente rapidísima, pero los experimentos reales hacen que uno desespere antes de ver la campana de Gauss. No hay contradicción en ello, por ejemplo podemos entender la probabilidad 1/2 de obtener cara como un límite cuando tiramos infinitas veces una moneda y no podemos exigir que tras 20 o 30 tiradas tengamos una aproximación precisa contando el porcentaje de aciertos.
Los siguientes gráficos muestran los histogramas de la suma de las puntuaciones de 10 dados comparados con la normal correspondiente cuando se repite el experimento cien, mil y diez mil veces. Naturalmente provienen de una simulación con ordenador.


veces.

Supongamos que una medida indirecta es función lineal de las magnitudes de entrada según la ecuación 33:
• El Teorema central del límite dice:
“La distribución asociada a Y se aproximará a una distribución normal de esperanza  y varianza
y varianza  siendo E(Xi) la esperanza de Xi y σ2(Xi) la varianza de Xi. Esto ocurre si las Xi son independientes y σ2(Y) es mucho mayor que cualquier otra componente individual ciσ2(Y)”
siendo E(Xi) la esperanza de Xi y σ2(Xi) la varianza de Xi. Esto ocurre si las Xi son independientes y σ2(Y) es mucho mayor que cualquier otra componente individual ciσ2(Y)”
Las condiciones del teorema se cumplen cuando la incertidumbre combinada uc(y) no está dominada por componentes de incertidumbre típica obtenidas por evaluaciones de tipo A basadas en pocas observaciones, o en evaluaciones de tipo B basadas en distribuciones rectangulares.
La convergencia hacia la distribución normal será tanto más rápida cuanto mayor sea el número N de variables involucradas, cuanto más normales sean éstas, y cuando no exista ninguna dominante.
En consecuencia, una primera aproximación para determinar la incertidumbre expandida que define un intervalo de nivel de confianza p será utilizar el factor de cobertura propio de una distribución normal, kp.

Si el número de lecturas aleatorias es pequeño, entonces el valor de uA derivado puede ser inexacto, y la distribución de la componente aleatoria es mejor representarla mediante la distribución t-Student. Sobreestimaríamos la incertidumbre, especialmente si q fuera pequeño y los valores de uA y uB fueran comparables en tamaño.
5.5.2. Grados de libertad efectivos. Aproximación de Welch-Satterthwaite
El problema se puede resolver empleando la fórmula de aproximación de Welch-Satterthwaite con la que se calcula el número de grados de libertad efectivos de la combinación de la distribución t-Student con una distribución gaussiana. La distribución resultante se tratará como una distribución t-Student con el número de grados de libertad calculados.

o bien:

Si se usan incertidumbres relativas, el número de grados de libertad efectivos es:

En evaluaciones tipo B, para calcular los grados de libertad efectivos, utilizaremos la aproximación dada por la siguiente fórmula:

Esta fórmula se obtiene al considerar la “incertidumbre” de la incertidumbre. Cuanto mayor sea el número de grados de libertad mayor es la confianza en la incertidumbre. En la práctica, en evaluaciones tipo B, vi→∞
En evaluaciones tipo A el cálculo del número de grados de libertad dependerá del estadístico empleado para evaluar el valor más probable.
6. Ejemplos de cálculo de incertidumbre: resolución, deriva, influencia de la temperatura en las medidas…
Ejemplo 1.
Resolución y redondeo
Evaluar la contribución a la incertidumbre debida a la resolución de un equipo de medida. Por ejemplo la resolución de un micrómetro centesimal (e = 0,01 mm) en la medida de un bloque patrón.
Tanto para equipos analógicos como para equipos digitales el hecho de emplear un instrumento con una resolución ‘e’ supone que la indeterminación de los valores medidos se encuentra entre ± e/2 con igual probabilidad en todo este rango; en este caso tenemos pues una distribución rectangular de semiamplitud 0,005 mm.
Por ello su contribución a la incertidumbre se evalúa como:

Tanto la resolución digital como la analógica, así como el redondeo, dan origen a una contribución de incertidumbre que puede ser analizada teniendo en cuenta una distribución rectangular con valor límite r/2
Ejemplo 2.
Deriva
Para la calibración de un micrómetro se emplean bloques patrón calibrados. Suponiendo que los bloques se encuentran dentro del periodo de calibración y se les permite una deriva de ± 30 nm entre calibraciones, evaluar la contribución a la incertidumbre debida a la deriva del valor del bloque desde la última calibración.
Puede considerarse para la deriva una distribución triangular, aunque podría tomarse una distribución rectangular. Teniendo en cuenta que entre calibraciones no se supera el valor ± e, se obtiene:

Ejemplo 3.
Certificado de calibración
Para la calibración del micrómetro los bloques que se emplean son calibrados por comparación y tienen una incertidumbre certificada de 60 nm para un factor de cobertura k = 2.
La evaluación de la incertidumbre típica asociada a un valor certificado se obtiene del propio certificado conociendo el factor de cobertura empleado. El resultado en este caso es:

Ejemplo 4.
Patrón de referencia
Para la calibración de un micrómetro se emplean bloques patrón calibrados por comparación con una incertidumbre certificada de 60 nm para un factor de cobertura k = 2. Suponiendo que los bloques se encuentran dentro del periodo de calibración y se les permite una deriva de ± 30 nm entre calibraciones; evaluar la incertidumbre asociada al uso de los bloques patrón como referencia en la calibración del micrómetro.
Se evalúa mediante la ley de propagación de incertidumbres como la raíz cuadrada positiva de la combinación cuadrática de la incertidumbre debida al certificado de calibración y la debida a la deriva del valor de dichos bloques en el tiempo, es decir

Ejemplo 5.
Influencia de la temperatura
En el caso anteriormente citado, supondremos que los bloques son de acero, con coeficiente de dilatación α = (11,5 ± 1) × 10-6 ºC-1 y suponemos que la medición se realiza en condiciones de laboratorio en el cual permitimos que exista una variación de temperatura durante el proceso de medición de ± 0,025 ºC. Para la medición de la temperatura se emplean sensores de temperatura cuya incertidumbre es 0,02 ºC y su resolución es 0,001 ºC. Evaluar la incertidumbre asociada a la temperatura
En el caso mencionado podemos suponer un modelo matemático:

En el modelo matemático no se especifican las correcciones, ya que lo que se busca es evaluar la incertidumbre asociada a la temperatura.
Los coeficientes de sensibilidad se evalúan calculando las derivadas parciales del modelo matemático respecto al coeficiente de dilatación y respecto a la variación de temperatura.
Con ello obtenemos:

y la contribución a la incertidumbre asociada a la longitud:

En este caso debemos tener en cuenta dos contribuciones de incertidumbre diferentes, una debida a la incertidumbre asociada al coeficiente de dilatación y otra a la incertidumbre asociada al conocimiento no exacto de la diferencia de temperatura respecto a 20 ºC en el instante de calibración.
1. u(α), Incertidumbre debida al coeficiente de dilatación
Para evaluar esta incertidumbre supondremos una distribución rectangular en torno al valor medio del coeficiente de dilatación cuyo semirrango es 1 × 10-6, por tanto la incertidumbre típica asociada se obtiene como:

2. u(θ), Incertidumbre debida al conocimiento no exacto de la diferencia de temperatura respecto a 20 ºC en el momento de la calibración
Para evaluar el valor de la temperatura de los bloques se emplean sensores de temperatura Pt-100 con resolución 0,001º C y se permite una variación de temperatura durante la medición de ± 0,025º C.
Consideraremos las siguientes fuentes de incertidumbre:
2.1 Variación de la temperatura Δ t, durante la medición
Suponiendo una distribución rectangular obtenemos:

2.2 Resolución del termómetro empleado
La incertidumbre asociada es:

2.3 Calibración del termómetro empleado
Según se especifica en el certificado de calibración su incertidumbre expandida es U (tcal) = 0,02 ºC para k = 2. Por lo tanto

2.4 Deriva del termómetro
Podemos estimar una deriva entre calibraciones de ± 0,01 ºC. En este caso supondremos una distribución rectangular, más conservadora que una triangular

Teniendo en cuenta todas las contribuciones asociadas al desconocimiento del valor de la temperatura, (47 a 50) del bloque obtenemos:

Empleando la fórmula 45 obtenemos:

7. Pasos a seguir para estimar el resultado de una medición
De forma esquemática y siguiendo las recomendaciones de la GUM los pasos a seguir para estimar la incertidumbre de medición son los siguientes:
1) Expresar matemáticamente la relación existente entre el mensurando Y y las magnitudes de entrada Xi de las que depende Y en la forma Y = f(Xi). La función f debe contener todas las magnitudes, incluyendo las correcciones.
2) Determinar xi, valor estimado de la magnitud de entrada Xi, bien a partir del análisis estadístico de una serie de observaciones, bien por otros métodos.
3) Evaluar la incertidumbre típica u(xi) de cada estimación de entrada xi. La evaluación podrá ser de tipo o A de tipo B.
4) Evaluar las covarianzas asociadas a todas las estimaciones de entrada que estén correlacionadas.
5) Calcular el resultado de medición; esto es, la estimación y del mensurando Y, a partir de la relación funcional f utilizando para las magnitudes de entrada Xi las estimaciones xi obtenidas en el paso 2.
6) Determinar la incertidumbre típica combinada uc(y) del resultado de medida y, a partir de las incertidumbres típicas y covarianzas asociadas a las estimaciones de entrada.
7) Si es necesario dar una incertidumbre expandida U, cuyo fin es proporcionar un intervalo [y − U, y + U] en el cual pueda esperarse encontrar la mayor parte de la distribución de valores que podrían, razonablemente, ser atribuidos al mensurando Y, multiplicar la incertidumbre típica combinada uc(y) por un factor de cobertura k, normalmente comprendido entre 2 y 3, para obtener U = k uc(y). Seleccionar k considerando el nivel de confianza requerido para el intervalo (normalmente el 95 %).
8) Documentar el resultado de medición y, junto con su incertidumbre típica combinada uc(y), o su incertidumbre expandida U.
Cuando el resultado de una medición viene acompañado de la incertidumbre expandida U = k uc(y), se debe:
a) describir completamente la forma en que se ha definido el mensurando Y;
b) indicar el resultado de la medición en la forma Y = y ± U, y dar las unidades de y, y de U;
c) incluir la incertidumbre expandida relativa U/⎜y⎜, ⎜y⎜≠0, cuando proceda;
d) dar el valor de k utilizado para obtener U [o, para facilitar al usuario el resultado, proporcionar tanto el valor de k como el de uc(y)];
e) dar el nivel de confianza aproximado asociado al intervalo y ± U, e indicar cómo se ha determinado;
8. Conclusiones
Todo proceso de medida tiene como fin obtener información sobre el mensurando con objeto de evaluar su conformidad con las especificaciones, realizar comparaciones o tomar otras decisiones. En cualquier caso, el resultado de la medida es tan importante como la calidad de dicha medida. La calidad de una medida se cuantifica mediante la evaluación de incertidumbre de dicha medida.
El resultado de toda medición y debe documentarse junto a su incertidumbre típica combinada uc(y), o su incertidumbre expandida U, indicando el factor de cobertura o el nivel de confianza asociado al intervalo y ± U.
La evaluación de la incertidumbre no es una tarea matemática unívoca, pero gracias a la Guía para la expresión de la incertidumbre de medida puede analizarse según unas reglas generales. Esta guía ha facilitado la comparación de resultados interlaboratorios dado que se ha extendido ampliamente y de esta forma se emplea un lenguaje común.
En este artículo se ha tratado de dar una breve descripción, acompañada de ejemplos, de los pasos a seguir en la determinación de incertidumbres siguiendo la GUM.
En un primer paso se debe representar mediante un modelo matemático el modelo físico de la medición que se realiza e identificar cada una de las magnitudes de entrada de las que depende, así como sus relaciones, si existen.
Posteriormente se evalúan las incertidumbres tanto desde un punto de vista objetivo, estadístico, como desde un punto de vista subjetivo, es decir teniendo en cuenta todos los aspectos que influyen en el resultado de una medida, como pueden ser los factores inherentes al instrumento, condiciones ambientales, etc.
Mediante la ley de propagación de incertidumbres u otros métodos se obtiene la incertidumbre típica combinada asociada a la estimación final del mensurando. Finalmente se amplia dicha incertidumbre mediante un factor de cobertura para obtener una incertidumbre expandida de forma que el nivel de confianza del intervalo y ± U sea mayor.
Bibliografía
- 1 Vocabulario Internacional de Metrología VIM, 3ª edición 2008 (español). http://www.cem.es/sites/default/files/vim3edes.pdf.
- 2 Metrología Abreviada, traducción al español de 3ª edición. Edición digital. http://www.cem.es/sites/default/files/metrologia20abreviada.pdf.
- 3 Evaluación de datos de medición. Guía para la expresión de la incertidumbre de medida. Edición digital.
- 4 Evaluación de datos de medición. Suplemento 1 de la Guía para la expresión de la incertidumbre de medida. Propagación de incertidumbres utilizando el método de Monte Carlo. http://www.cem.es/sites/default/files/suplemento20120de20gum.pdf.
- 5 UNE-EN ISO 14253-1:1999: “Especificación geométrica de productos (GPS). Inspección mediante medición de piezas y equipos de medida. Parte 1: Reglas de decisión para probar la conformidad o no conformidad con las especificaciones”.
- 6 LIRA Ignacio. “Evaluating the Measurement Uncertainty”, Bristol, IoP Publishing Ltd., 2002
- 7 JGCM 102:2011. Evaluation of measurement data – Supplement 2 to the “Guide to the expression of uncertainty in measurement” – Extension to any number of output quantities. http://www.bipm.org/utils/common/documents/jcgm/JCGM_102_2011_E.pdf.
- 8 JCGM 106:2012. Evaluation of measurement data – The role of measurement uncertainty in conformity assessment
http://www.cem.es/sites/default/files/gum20digital1202010.pdf.






Comentarios