
Universidad Complutense de Madrid
Departamento de Óptica
Grupo Complutense de Óptica Aplicada
Facultad de Ciencias Físicas,

Universidad Complutense de Madrid
Departamento de Óptica
Grupo Complutense de Óptica Aplicada
Facultad de Ciencias Físicas

Universidad Complutense de Madrid
Departamento de Óptica
Grupo Complutense de Óptica Aplicada
Facultad de Ciencias Físicas

Mondragón, Guipúzcoa,

Departamento de Óptica
Grupo Complutense de Óptica Aplicada
Facultad de Ciencias Físicas
Resumen: Los codificadores ópticos de la posición lineal y angular basados en sistemas de doble red se utilizan ampliamente en la industria por su robustez y características metrológicas. Debido al bajo periodo de las redes de difracción utilizadas, los efectos difractivos son importantes en este tipo de codificadores. Por otro lado, dichas redes de difracción nunca son perfectas, sino que pueden presentar perturbaciones que afectan a las señales generadas. En este artículo se describen los procesos de generación de señales mediante sistemas de doble red y se analiza el efecto que las imperfecciones en las redes de difracción tienen en la medida. Como caso particular, nos centraremos en los codificadores con escalas grabadas en acero ya que en la actualidad se están desarrollando aplicaciones interesantes, como los codificadores anulares.
Palabras clave: Codificación óptica, difracción, desplazamiento lineal, desplazamiento angular
Abstract: Optical linear and angular encoders based on double grating systems are widely used in industry since their robustness and metrological characteristics. Due to the small period of the diffraction gratings, diffractive effects are important for this type of encoders. Moreover, these gratings are never perfect but may present irregularities affecting the signals. In this article, the process of signal generation by double-grating systems is described and the effect on the measurement of non-ideal diffraction gratings is analyzed. As a particular case, we will focus on encoders and scales engraved in steel. Currently interesting applications, such as ring encoders, are been developed.
Keywords: Optical coding, difraction, linear displacement, angular displacement
Introducción
Un codificador óptico es un dispositivo opto-electrónico-mecánico que transforma una distribución de luz en señales eléctricas, las cuales se utilizan para determinar la posición relativa o absoluta entre una cabeza lectora móvil y una escala patrón fija. Existe una gran variedad de dispositivos de codificación basados en distintos fenómenos físicos, siendo cada uno de ellos útil dentro de un determinado campo de aplicación. Los dispositivos comerciales más utilizados son los magnéticos (inductivos, magnetorresistivos, magnetostrictivos) y ópticos (interferométricos, difractivos, interfero-difractivos). Los codificadores ópticos interferométricos se emplean principalmente en entornos de laboratorio y para la calibración de máquinas. Dada su robustez ante variaciones medioambientales, los codificadores ópticos difractivos, basados en el uso de redes de difracción, se suelen utilizar preferentemente en entornos industriales. Por ejemplo, se pueden encontrar en máquina-herramienta, robótica, máquinas de ‘pick & place’, motores lineales, instrumentación científica y médica, etc.
La base de la medida en los codificadores difractivos e interfero-difractivos está en la gran resolución que presenta el grabado de las líneas que conforman la red de difracción, que actúa de escala. Las redes de difracción utilizadas en estos codificadores tienen periodos en el rango 1 µm – 100 µm, con una incertidumbre en la posición de cada una de las líneas en el orden del nm. Con estos periodos tan bajos, los efectos difractivos son muy relevantes, por lo que se produce el efecto Talbot, es decir, auto-imágenes de la propia red a distancias determinadas de la misma [1]. Si nos salimos de estas posiciones, las señales ópticas se pierden y el sistema deja de medir. Es por ello necesario un control estricto de las tolerancias mecánicas, tanto en distancias entre elementos como en rotaciones relativas. Otro factor importante en el diseño de este tipo de instrumentos de medida es la tendencia hacia la miniaturización de las cabezas lectoras, para poder ser utilizados en cada vez más aplicaciones. Esto ha requerido un cambio en la tecnología óptica para la obtención de las señales La configuración típica para los codificadores ópticos se basa en sistemas de doble red [2, 3]. Estos codificadores tienen dos redes en serie; una es la escala que se ubica en la parte fija y la otra se encuentra en la cabeza lectora móvil, la cual forma un patrón de franjas a ciertas distancias desde la segunda red, Fig. 1. Hay varios fotodetectores situados detrás de la cabeza lectora que transforman las variaciones de intensidad óptica del campo de iluminación en señales eléctricas. Cuando hay un desplazamiento relativo entre la regla y la cabeza lectora, la intensidad total de luz en los fotodetectores varía periódicamente. Las señales suministradas por los fotodetectores se combinan usando un circuito electrónico apropiado, dando origen a dos señales eléctricas periódicas que están desfasadas 90º entre sí. Un periodo de estas señales sinusoidales se corresponde con un desplazamiento igual a un periodo del grabado básico de la regla.

Con las señales suministradas por estos dispositivos es posible realizar una interpolación de las señales que permita resoluciones de hasta unos pocos nanómetros. Para esta interpolación se emplea el conocido algoritmo de la arcotangente [4], aunque también es posible aplicar otros algoritmos más complicados.
El comportamiento correcto de un codificador óptico que mida el desplazamiento lineal o angular se puede ver afectado, entre otros, por factores mecánicos, ópticos o eléctricos que modifican las señales eléctricas y, por tanto, la correcta medida del desplazamiento. Entre los efectos que perjudican las señales nos podemos encontrar variaciones de temperatura respecto del valor nominal, vibraciones, variaciones en las distancias y rotaciones entre los elementos mecánicos, deformaciones de origen elástico, deformaciones permanentes asociadas al envejecimiento de los materiales, errores en el proceso de replicación de las escalas o partículas de suciedad depositadas sobre ellas [5]. Otras posibles perturbaciones del comportamiento ideal son la fuente de luz [6] y las variaciones en la amplificación de la señal óptica. Como resultado conjunto de todos estos efectos que modifican la señal eléctrica, se puede producir un error en la estimación de la posición debido a que el algoritmo que procesa dichas señales eléctricas no funciona adecuadamente. Uno de los principales objetivos en el diseño de un codificador óptico es elegir una configuración que minimice la modificación los valores nominales de las señales eléctricas, permitiendo tolerancias más amplias tanto en el montaje como en el funcionamiento de estos dispositivos.
En cuanto a las redes de difracción, éstas normalmente se graban en sustrato de vidrio, mediante técnicas fotolitográficas, Fig. 2 izq. Sin embargo, uno de los usos más importantes de los codificadores ópticos es en máquina-herramienta donde, por un lado las condiciones ambientales suelen ser bastante duras para el proceso de medida y, por otro, el rango de medida puede ser tan grande como decenas de metros. En estos casos, las escalas o reglas grabadas en vidrio no son aceptables debido a su fragilidad, . En estos casos se utilizan entonces escalas grabadas sobre fleje de acero, Fig. 2 der. Sus propiedades ópticas son peores, pues la superficie metálica presenta una cierta rugosidad que afecta al proceso de formación de auto-imágenes aunque, por otra parte, sus propiedades mecánicas son ideales para estas aplicaciones. Las escalas de acero también se utilizan en codificadores angulares de alta velocidad. Por ello, se han estudiado en profundidad este tipo de codificadores, pues la no-idealidad de los componentes puede producir errores en las señales [7, 8, 9, 10, 12].

En este artículo veremos, en un primer lugar, las técnicas ópticas de codificación de la posición lineal o angular en sistemas de doble red. Seguidamente revisaremos el proceso de medida y los errores metrológicos que pueden acaecer en este tipo de codificadores. Finalmente, analizaremos los codificadores angulares cuya escala está grabada en acero.
Técnicas de lectura para codificadores ópticos de doble red
Los sistemas de lectura más extendidos en los codificadores ópticos se basan en el uso de dos redes de difracción. Consiste en la variación de la intensidad luminosa de un haz de luz cuando atraviesa consecutivamente dos redes de difracción, que son tramas periódicas. Su utilidad reside en el trasvase que se produce de un efecto microscópico (un desplazamiento del orden del periodo de las redes) a otro macroscópico y más fácilmente medible.

Restringiéndonos a las técnicas ópticas para la medida de desplazamientos basadas en doble red, existen varias técnicas de lectura. La primera técnica de lectura es la configuración Moiré, Fig. 3 izq, donde un haz colimado atraviesa las dos redes. Realizando un análisis puramente geométrico, el resultado esperado sería unas señales perfectamente triangulares. En la práctica, no se obtiene este resultado porque se emplean mecanismos de tipo óptico encaminados a obtener una señal sinusoidal. Esta configuración requiere el uso de un emisor lo más puntual posible que se ubica en el plano focal de una lente. Esto hace que las cabezas lectoras tengan un tamaño excesivo. Una forma de mejorar el sistema de iluminación es mediante la configuración Lau, donde se puede utilizar una fuente extensa, Fig. 3 centro, por lo que se pueden utilizar fuentes de luz tipo LED. La idea de esta técnica es deslocalizar las zonas de lectura, utilizando un mecanismo de formación de imagen de tipo colectivo. Las franjas de luz empleadas para medir el desplazamiento tienen su origen en todos los puntos de la cabeza lectora y, a su vez, están influidos por todos los puntos de la superficie muestreada en la retícula patrón. De esta forma la cabeza lectora se hace más insensible a posibles imperfecciones en la escala. No obstante, en la configuración Lau también es necesario el uso de una lente, para traer la imagen, que se forma en el infinito, a un plano donde se puedan ubicar los fotodetectores. Finalmente, la configuración más compacta es la auto-imagen generalizada, Fig. 3 derecha donde, también utilizando un mecanismo colectivo de formación de imágenes, se puede utilizar fuente extensa y no es necesario el uso de lentes [11].

El sistema de detección también puede ser un elemento clave en la eliminación de las irregularidades en las señales (suciedad local, defectos del grabado, etc.). El sistema de lectura tradicional utiliza cuatro campos de iluminación espacialmente separados. Esta diferencia de posición lleva a que cada una de las ventanas se vea afectada de diferente manera. El resultado es que, conforme se desplaza la cabeza lectora respecto de la escala patrón, los parámetros de ajuste de las señales eléctricas fluctúan. Estos efectos se pueden minimizar utilizando, en lugar de fotodetectores monolíticos, sistemas de detección que estén entrelazados entre sí. De esta forma las posibles irregularidades se transmitirán de forma parecida en todos los fotodetectores, por lo que su efecto se verá minimizado [13], Fig. 4.
Proceso de medida
Como se ha indicado anteriormente, el proceso de medida de un codificador óptico de la posición se basa el que el desplazamiento entre la escala y la red de lectura produce una fluctuación en la señal recogida por un fotodetector. En el modelo geométrico esta variación es lineal, pero debido a procesos difractivos, el tamaño finito y la policromaticidad de las fuentes de luz, la variación de la señal es casi sinusoidal. Para conocer el sentido del desplazamiento, en lugar de una segunda red de difracción, se coloca una máscara con 4 redes de difracción del mismo periodo desplazadas entre sí 90º eléctricos. Detrás de cada red se ubica un fotodetector y las señales generadas se restan 2 a 2 para eliminar la señal de fondo. El sistema de fotodetección mostrado en la Fig. 4 combina ambos elementos para obtener las señales y restarlas en el propio chip. Podemos representar de forma matemática las señales de un codificador de posición como

donde x es la posición a determinar, p es el periodo de la red de difracción, A1 y A2 son las amplitudes de las señales periódicas, B1 y B2 son los niveles de descentramiento debido a que la resta no produce un valor exactamente nulo, Φ1 y Φ2 son los desfases entre las señales y, por último, F1 y F2 son las funciones que describen la forma de las señales, estando estas últimas caracterizadas por cumplir min(F) = -1 y max(F) = +1. Idealmente estas señales deberían cumplir las siguientes condiciones:
- Las amplitudes son iguales A1 = A2 = A.
- Los descentramientos son nulos B1 = B2 = 0.
- El desfase entre señales es un cuarto del periodo Φ1 – Φ2 = π/2.
- Las señales son sinusoidales F1 = F2 = sen.
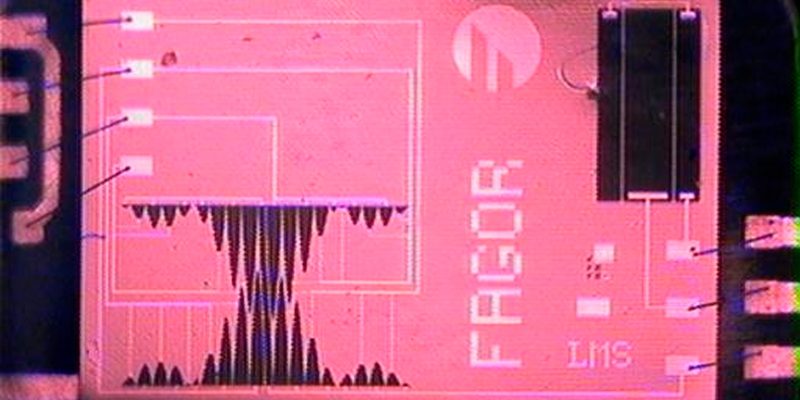
Si estas señales ideales se visualizan una frente a la otra en un osciloscopio puesto en la forma XY el resultado es un circulo perfecto centrado en el origen, tal como puede verse en la Fig. 5.

Como se ha introducido anteriormente, a partir de las señales eléctricas es posible obtener la fase relativa de las señales del codificador empleando el conocido algoritmo de la arcotangente,

Contando el número de veces que cada una de las señales pasa por el origen, podemos medir el desplazamiento relativo en unidades del periodo de la escala. A este valor hay que añadir xarctg que proporciona la interpolación dentro de cada periodo.
Errores metrológicos
En un codificador real, las señales (1) se suelen apartar ligeramente de este caso ideal dado por

En la Fig. 6 se muestran algunos ejemplos de las señales obtenidas en codificadores a los que se les ha desajustado convenientemente dichas señales.

Para determinar analíticamente el error cometido en la estimación de la posición cuando se utiliza el algoritmo de la arcotangente debemos aplicar la siguiente expresión


A partir de la expresión analítica (4) podemos ver que las variaciones sobre las condiciones ideales, tales como el ruido, variaciones de amplitud, descentramientos, etc., producirán un error periódico de corto alcance que se superpone a la gráfica de precisión del codificador. El periodo de dicho error es el mismo que el del grabado de la escala, Fig. 7. Esto quiere decir que si medimos en distancias enteras de un periodo, este error no se va a observar. Por otra parte, desde un punto de vista gráfico, este error periódico puede ser considerado como una banda de incertidumbre asociada a la medida. El concepto queda claro al ver la representación mostrada en la Fig. 8.

Por los motivos anteriormente indicados, vemos que es muy importante la adecuada selección de los dispositivos electrónicos que tratan la señal de los codificadores. Otros factores que hay que tener en cuenta son las derivas temporales de los componentes electrónicos, las variaciones de valores eléctricos con la temperatura y las tolerancias de fabricación de los componentes. Estos factores conducen a ligeros desajustes, difícilmente controlables y/o compensables, de los codificadores. La consecuencia directa es que existe un límite práctico de exactitud en los codificadores. Está directamente relacionado con el periodo de grabado, siendo además proporcional al mismo. Una estimación realista sería decir que la precisión de la medida realizada con un codificador está limitada por una incertidumbre de ±0,01 periodo.
Codificadores angulares sobre disco de acero
Como caso particular, vamos a analizar los codificadores de la posición angular con escalas grabadas sobre acero. Aquí, la falta de idealidad reside en dos aspectos fundamentales. Por un lado, la escala deja de ser plana, como se muestra en la Fig. 9, por lo que el comportamiento de las auto-imágenes generadas por la red de difracción, que presenta una cierta curvatura, puede perjudicar su correcta lectura [14, 15, 16, 17].

Por otro lado, la superficie metálica presenta imperfecciones en forma de rugosidad. Esto hace que el fenómeno de formación de auto-imágenes se vea fuertemente perjudicado, como se muestra en la Fig. 10. A partir de una cierta distancia, no se produce señal en forma de franjas sinusoidales, por lo que se hace imposible la lectura del desplazamiento. Esto hace que sea necesario un análisis en profundidad del proceso de lectura de este tipo de codificadores angulares [18, 19].

Finalmente, hay que considerar que la grabación de este tipo de discos anulares no se puede hacer con técnicas fotolitográficas y por ello, ha sido necesario desarrollar un equipo de grabación basado en un láser pulsado de nanosegundos de Nd:YAG. La emisión natural de este tipo de láseres es en el infrarrojo, pero con un módulo doblador de frecuencia SHG, Second Harmonic Generator, se consigue la emisión del haz láser a 532 nm y una potencia máxima de 11 W, que se focaliza sobre el disco sustrato. El sistema de grabación completo consta de seis motores sobre los que se colocan tanto el sustrato como el láser, que están anclados a una bancada de granito con un soporte neumático de control del flujo de aire que mantiene la mesa nivelada y mantiene el sistema de grabación libre de vibraciones. En la Fig. 11 izda. vemos una imagen del equipo de grabación. Para la grabación de la escala se ha utilizado un sistema de rotación para el disco que consta de un motor rotador con un codificador óptico y dos cabezas lectoras, que proporcionan una resolución angular de 0,016 segundos de arco y dos motores lineales para el desplazamiento horizontal y vertical del láser, éste último para la grabación vertical de cada línea, con una precisión en su movimiento de 12,5 µm y 2 µm respectivamente.

Los aspectos más complejos de la grabación han sido la selección de la potencia de grabado, para obtener unas líneas con gran uniformidad, un control térmico que evite variaciones de temperatura en el área de trabajo, y el centrado del disco, ya que es necesario centrarlo respecto al eje de rotación por debajo de la profundidad de foco del láser. En la Fig. 11 dcha. se muestra una representación de la excentricidad del disco respecto a su eje de rotación tras el proceso de centrado, medidas con un palpador mecánico. Respecto a los efectos térmicos, las variaciones de temperatura durante el proceso de grabación causan contracciones y dilataciones en algunos materiales que componen el equipo (como por ejemplo las sujeciones de los espejos galvanométricos que centran el haz en la generatriz del sustrato o la plataforma de sujeción del anillo sustrato o el mismo anillo). Esto a su vez causa que la posición del haz láser sobre la generatriz del sustrato vaya variando a lo largo del proceso de grabación, a medida que la temperatura del área de trabajo cambia. Por lo tanto, a lo largo del proceso de grabación, las líneas se irán grabando progresivamente en posiciones mayores (si existe contracción debido a disminución de la temperatura) o menores (si existe dilatación debido a aumento de temperatura) al periodo de la red programado o deseado. En la Fig. 12 vemos un ejemplo de un sustrato anular en el que se ha grabado una escala a lo largo de todo su perímetro. Se distingue claramente entre dos de las líneas una separación superior al periodo que guardan el resto de las demás líneas de la escala. La línea situada a la derecha es la primera línea grabada en el sustrato y la de la izquierda corresponde a la última, y comprobamos que existe un desplazamiento tanto vertical como horizontal de las líneas debido a un aumento de temperatura durante el proceso que conlleva dilataciones. Por lo tanto, será de vital importancia controlar térmicamente el proceso para la conservación de la periodicidad de las líneas, hecho crucial para el correcto funcionamiento posterior de la escala.

Conclusiones
Los codificadores ópticos de la posición lineal y angular basados en sistemas de doble red se utilizan mayoritariamente en entornos industriales por su robustez y capacidades metrológicas. No obstante, el funcionamiento de estos sistemas puede variar respecto a su condición ideal debido a imperfecciones mecánicas, ópticas, eléctricas o a errores en la escala de medida. Estas variaciones producen errores metrológicos que deben conocerse para poder determinar cuál es la incertidumbre en la medida. Dichos errores aumentan cuando se utilizan redes imperfectas como las grabadas en flejes de acero. No obstante, mediante un adecuado diseño de las cabezas lectores, este tipo de errores se puede minimizar.
Bibliografía
[1] E. Keren, O. Kafri, “Diffraction effects in moiré deflectometry”, Journal of the Optical Society of America. A 2(2) 111-120 (1985)
[2] K. Patorski “The Self-Imaging Phenomenon and its Applications” Progress in Optics 27, 1-108 (1989)
[3] E. Bernabeu, et. al “Configuraciones difractivas de doble paso para codificadores ópticos de la posición lineal y angular” 5º Congreso Español en Metrología (2013)
[4] L.M. Sanchez-Brea, T. Morlanes. “Metrological errors in optical encoders”. Measurement Science & Technology, 19(11), 2008.
[5] I. Alejandre “Análisis del comportamiento mecánico de los encoderes ópticos lineales: recomendaciones de diseño” Tesis doctoral, Universidad Nacional de Educación a Distancia, 2004.
[6] F.J. Torcal-Milla, L.M. Sanchez-Brea, J. Vargas. “Effect of aberrations on the self-imaging phenomenon”. Journal of Lightwave Technology, 29(7):1051-1057, 2011.
[7] L.M. Sanchez-Brea, F.J. Torcal-Milla. “Self-imaging of gratings with two roughness levels”. Optics Communications, 285(1):13-17, 2012.
[8] L.M. Sanchez-Brea, F.J. Torcal-Milla. “Near-field diffraction of gratings with surface defects”. Applied Optics, 49(11):2190-2197, 2010.
[9] F.J. Torcal Milla, “Rough diffraction gratings: applications to linear optical encoders” Tesis doctoral, Universidad Complutense de Madrid, 2009
[10] F.J. Torcal-Milla, L.M. Sanchez-Brea, E. Bernabeu. “Diffraction of gratings with rough edges”. Optics Express, 16(24):19757-19769, 2008.
[11] D. Crespo, J. Alonso, E. Bernabeu “ Generalized grating imaging using an extended monochromatic light source” Journal of the Optical Society of America A, 17(7): 1231-1240, 2000
[12] F.J. Torcal-Milla, L.M. Sanchez-Brea, E. Bernabeu. “Self-imaging of gratings with rough strips”. Journal of the Optical Society of America A, 25(10):2390-2394, 2008.
[13] T. Morlanes, D. Crespo, J. Alonso “Disposición optoelectrónica de fotodetectores para la medición de longitud” ES2166717 (2003)
[14] F.J. Torcal-Milla, L.M. Sanchez-Brea, E. Bernabeu. “Talbot effect with rough reflection gratings”. Applied Optics, 46(18):3668-3673, 2007.
[15] F.J. Torcal-Milla, L.M. Sanchez-Brea, F.J. Salgado-Remacha, E.Bernabeu. “Self-imaging with curved gratings”. Optics Communications, 283(20):3869-3873, 2010.
[16] F.J. Torcal-Milla, L.M. Sanchez-Brea, Eusebio Bernabeu. “Near field diffraction of cylindrical convex gratings”. Journal of Optics, 17(3):035601, 2015.
[17] F.J. Salgado-Remacha, F.J. Torcal-Milla, L.M.l Sanchez-Brea, E. Bernabeu. “Use of steel substrates in diffractive optics: Near field of high surface quality steel tape gratings”. Optics & Lasers in Engineering, 49(3):356-360, 2011.
[18] F.J. Torcal-Milla, L.M. Sanchez-Brea, E.Bernabeu. “Double grating systems with one steel tape grating”. Optics Communications, 281(23):5647-5652, 2008.
[19]F.J. Torcal-Milla, L.M. Sánchez Brea, E. Bernabeu, T. Morlanes “Codificadores ópticos rotatorios de tecnología Moiré” 7ª Reunión Española de Optoelectrónica, OPTOEL’11 (2011)
[20] M. Irigoyen, I. Jimenez-Castillo, F.J. Salgado-Remacha, L.M. Sanchez-Brea, E. Bernabeu. “Diffraction gratings over cylindrical surfaces by laser ablation”. Optica pura y aplicada, 46(3):275-284, 2013.






Comentarios