
Escuela Universitaria de
Enfermería y Fisioterapia
San Juan de Dios
Universidad Pontificia Comillas de Madrid

Escuela Técnica Superior
de Ingeniería ICAI
Universidad Pontificia Comillas de Madrid
En la Universidad Pontificia Comillas de Madrid se está llevando a cabo una estrecha colaboración entre el laboratorio de análisis de la marcha de la Escuela Universitaria de Fisioterapia, y el laboratorio de Metrología Dimensional del Dpto. de Mecánica de la Escuela Técnica Superior de Ingeniería. El objetivo es implementar las técnicas de calibración que se utilizan extendidamente en Máquinas de medición por coordenadas, para al menos la verificación de los sistemas de análisis de la marcha.
In the Universidad Pontificia de Comillas of Madrid there is a close cooperation between the gait analysis Laboratory of the University School of Physiotherapy and the Dimensional Metrology Laboratory of the Department of Mechanical Engineering of the Superior Technical School of Engineering. The aim is to implement the calibration techniques, which are widely used in coordinate measurement machines, to at least verify the motion analysis systems.
1. Introducción
“Una medida sin incertidumbre no está completa”. Un metrólogo necesita más información. Necesita conocer la variabilidad de esa medida, dentro de unos márgenes razonables. No vale con decir que el diámetro es 15 mm, sino que se nos ha de indicar la seguridad de ese valor. Se debe especificar o cuantificar el margen de variabilidad de la medición.
Así, siempre esperamos leer 15 mm ± U mm, donde U es su incertidumbre. ¿Qué sucede entonces cuando el metrólogo acude al médico?. ¿O al fisioterapeuta?. Cuando en la Salud, se decide un tratamiento, éste es siguiendo un diagnóstico basado en mediciones. Mediciones tan sencillas como la presión arterial, o tan complejas como los resultados de un TAC. Y con la salud no se juega, ¿por qué entonces no se proporciona la incertidumbre de las medidas aportadas en el entorno de la salud?.
Muchos contestarían porque es muy complicado calcularlo. No creemos que sea así. Los profesionales del sector tienen una formación científica más que suficiente para abordar unos cálculos aproximados del orden de magnitud de las incertidumbres de los equipos que manejan.
Nosotros estamos convencidos de que es más bien un desconocimiento de su utilidad, de desbordamiento por las tareas que diariamente realizan y “que les come el tiempo”, y muy posiblemente por una falta de sintonía entre dos profesiones tan dispares como pueden ser la fisioterapia/medicina y la ingeniería industrial.
En este artículo, presentamos la experiencia que ha resultado de la estrecha colaboración entre la Escuela de Fisioterapia y la de Ingeniería Industrial de la Universidad Pontificia Comillas de Madrid. Demostramos que la colaboración es posible y deseable. Que aporta beneficios y asegura la fiabilidad de las mediciones en la salud.
El equipo en el que se ha trabajado durante la experiencia, ha sido un equipo de Análisis de la marcha. Este equipo tiene dos utilidades básicas en la fisioterapia y la salud. Por un lado sirve para diagnosticar posibles lesiones por la forma de caminar de una persona, ayuda al traumatólogo y neurólogo a realizar intervenciones certeras sobre el sistema locomotor del paciente [4], o bien para mejorar los movimientos en atletas de alto rendimiento. En cualquiera de los casos, la actuación a realizar, se basa en las medidas que el sistema aporta.
Comencemos con una descripción del equipo verificado, para luego describir el proceso utilizado en el aseguramiento de su calidad metrológica y los resultados obtenidos.
Equipo de análisis de la marcha vs Máquina de medir por coordenadas.
El sistema de medición es muy sencillo. Con un mínimo de entre 5 y 6 cámaras de video, se graba el movimiento de una persona al caminar por un área específica, lo que en metrología denominaríamos el volumen de medición.
Esta técnica es una evolución natural de la fotogrametría aérea. Así, la fotogrametría lleva utilizándose desde los albores de la aviación para realizar mapas precisos de la geografía terrestre. En este caso el objeto fotografiado (el relieve terrestre) permanece “quieto”, mientras que es el avión con las cámaras es el que está en movimiento. Con las mismas cámaras se realizan fotografías de cada detalle geográfico, pero desde distintas posiciones. Y por triangulación, es posible reproducir la topografía del terreno.
Los cálculos matemáticos asociados no son más complejos que los utilizados para los levantamientos de terreno con los que habitualmente convivimos en las obras urbanas. Evidentemente son más largos, pues se trabaja con más datos, pero no más complejos. Y sus algoritmos son bien conocidos desde hace tiempo, con lo que su implementación no ha supuesto ningún problema.
De esta forma, se dispone de un sistema de medición topográfica con cámaras fotogramétricas capaz de medir el relieve terrestre, con tanta precisión como permitan las cámaras, la precisión en el cálculo y la información del movimiento relativo. Actualmente esta precisión es sorprendente. Las cámaras son calibradas incluso en los NMI, como el Centro Español de Metrología, la precisión no es un inconveniente y los algoritmos pueden implementarse en ordenadores de muy altas prestaciones. ¿Por qué no aplicar esta técnica a otros ámbitos?.
A la par, surgieron otras posibilidades, con la puesta en órbita masiva de satélites de uso militar y comercial. Llegaron las aplicaciones de ocio, por decirlo de alguna forma.
Actualmente, mediante las fotografías que los satélites sacan diariamente de la superficie de la tierra, podemos detectar la información de detalle de un paisaje con resolución espectacular. ¿Quién no ha curioseado en algunas de las aplicaciones gratuitas de internet que permiten localizar prácticamente cualquier paisaje en la tierra?. ¿Cómo no buscar la calle en la que se vive sin más que introducir las coordenadas terrestres GPS?. El avance es impresionante. Hace unas décadas, los mapas eran casi secreto militar, ahora con un click puedo conocer las curvas de nivel de la montaña a la que iré el fin de semana a hacer senderismo, y saber si es una ruta sencilla o difícil.
Toda esta tecnología, tan al alcance de todos, ha visto su aplicación en otros ámbitos, entre ellos el cine y la medicina/fisioterapia.
En el cine, pocos son los que no han visto u oído hablar de Matrix. Mediante varias cámaras situadas alrededor del actor, se grababa el movimiento del mismo, de manera que en la producción de la película, podría realizarse la secuencia de imágenes procedentes de cada cámara tomadas en el mismo instante pero desde distintas posiciones. El efecto sorprendió mundialmente, era como si el tiempo se hubiera parado. Fue una película muy cara, pero introdujo la variable espacial en el cine. En cualquier momento, podía accederse a toda la información espacial de la escena. El tiempo, que en el cine clásico avanza inexorablemente en una dirección, en matrix parece poder controlarse.
Esta película marcó un hito en el cine de acción, que incluso se ha trasladado a las animaciones para niños. ¿Quién no ha visto ya dibujos animados con el mismo tipo de escenas?. Más aún, ¿por qué no hacerlo en los videojuegos y consolas?. Se dio un paso más en la socialización de la tecnología, en la transferencia a la sociedad. Inicialmente pareció encontrar un obstáculo. Pocos dibujantes, aún con la asistencia de complejos programas de animación, conseguían dar el realismo a los movimientos que hay en la naturaleza. Pocos dibujantes eran capaces de crear la fluidez de movimientos que podemos apreciar en películas infantiles como las de Disney. Pensemos por ejemplo, en la de Blancanieves. En ella, los dibujantes pasaron largas sesiones con actores que reproducían los movimientos que luego se ven la película. Eran sus modelos, sus patrones. Los observaban desde distintos ángulos, les hacían repetir la escena, los dibujaban una y otra vez. Estaban aplicando fotogrametría.
¿Por qué no conjugar esa forma de animar con varias cámaras que simultáneamente graben a los actores?. Más aún, ¿por qué no colocar sobre los actores unas dianas o marcadores [1], en los puntos anatómicos más relevantes para caracterizar el movimiento?. ¿por qué no seguir el movimiento de esas referencias desde varios puntos de vista?. ¡Eureka!. Por fotogrametría, podría conocerse la posición de cada punto en tres dimensiones y en el tiempo. Bastaría entonces con asociar cada punto, en su trayectoria espacial y temporal, con el punto homólogo del personaje animado, esto es, codo con codo, rodilla con rodilla, dedo con dedo. La limitación sería sólo el número de dianas que estuviéramos dispuestos a colocar, el número de cámaras a situar, la resolución de ellas, la potencia de cálculo de la máquina asociada. Pero la solución estaba ahí. Y así se grabó Avatar. Otra película que ya muchos la incluyen en la categoría de cine de culto.
Avatar fue también una producción muy cara, pero difundió la técnica. Se mostró espectacularmente una solución con aplicaciones inimaginales. Era posible registrar el movimiento de puntos en el espacio y tiempo, computarlos, y utilizarlos. Se popularizó el uso de estos equipos.
En medicina y fisioterapia, ya habían surgido las aplicaciones de este tipo de equipos. Menos ambiciosos que sus primos de Hollywood, pues bastaba con registrar la información de un número de puntos relevantes mucho más restringido para el movimiento en estudio. Pero se popularizaron en su uso, a la par que el séptimo arte lo divulgaba mundialmente.
Y surgió la oportunidad. ¿Por qué no aplicar estas técnicas a los deportistas?. ¿por qué no estudiar en detalle el movimiento de los que mejor rendimiento tienen en las distintas disciplinas? [13 a 17]. ¿Por qué no utilizarlo para mejorar aún más?. Y aquí es donde estamos ahora. Disponemos de una tecnología relativamente accesible, más aún si lo comparamos en precio con otros equipos médicos, que no supone riesgo para el paciente/deportista y que con un simple paseo por el volumen de medición, permite obtener mucha información.
Más aún, en Metrología Dimensional se realizan mediciones 3D de muy alta precisión. No es habitual incluir la coordenada temporal, porque las piezas y los patrones normalmente no están vivos. No evolucionan con el tiempo, y si lo hacen es indeseable. Es lo que denominamos deriva. Pero ¿y si aplicásemos las técnicas de aseguramiento de la medición de las máquinas de medir por coordenadas a los equipos de análisis?. ¿Se podría?. La definición de máquina de medición por coordenadas tal y como se especifica en la ISO 10360-1 [21] es aquel sistema de medición que permite determinar coordenadas espaciales mediante un sistema de captación. Realmente podría decirse que el equipo de análisis de la marcha se trata de una CMM que además almacena secuencialmente la información en el tiempo de su mensurando. ¿Por qué no utilizar entonces los mismos sistemas de verificación y calibración?.
Para contestar a estas preguntas, es conveniente comparar primero ambos sistemas de medición, pero desde un punto de vista metrológico. Empecemos con las partes de cada sistema.
Elementos de medida: cámaras de video.
Recogen el movimiento de una o múltiples articulaciones, así como sus características (velocidad, aceleración, repetición de la ejecución del movimiento), que se produce en el sujeto bajo estudio.
Suelen constar de un mínimo de 4 cámaras [2] para que al menos siempre 2 de ellas puedan ver un mismo punto y puedan analizar los cambios que se producen en el espacio. Estas cámaras están conectadas (por cable o a través de telemetría) y a través de software complejo en donde la bioingeniería es imprescindible para su desarrollo, para permitir implementar sistemas de análisis de movimiento según el clínico considere.
Las cámaras están sincronizadas entre ellas [3] para conocer y calcular un punto que viene registrado por un marcador, en el espacio. Para que el software pueda reconocer la distancia a la cual se encuentran las cámaras y de ese modo poder calcular los parámetros de registro se debe haber inicializado las cámaras con la referencia que el propio fabricante proporciona.
Es muy difícil encontrar un laboratorio en el que las cámaras que se utilizan estén calibradas y trazadas en el estricto sentido del VIM.
¿Por qué no?. Si se calibran las fotogramétricas, podrían calibrarse éstas. Pero no se hace. No hay cultura metrológica entre los sanitarios.
Bien, quizás sea mejor verificar/calibrar todo el conjunto. Supongamos entonces que las cámaras son el sistema sensor de la tridimensional, que de aquí en adelante podríamos llamar cuatridimensional (tres coordenadas espaciales y una temporal).
Metrológicamente podríamos hablar de las cámaras como el palpador sin contacto de nuestra cuatridimensional.
Mensurando: dianas o marcadores.
En la cuatridimensional, los marcadores suelen ser esferas o semiesferas recubiertas de un material reflectante. Para mejorar la medición, las cámaras emiten normalmente en el ultravioleta, y miden la reflexión que reciben de las esferas. La imagen es mucho más nítida y se incrementa la resolución de la imagen.
Éstas deben colocarse sobre referencias anatómicas óseas de fácil acceso [5 a 7], y escasa variabilidad de posicionamiento en los movimientos a realizar.
El uso de esferas o semiesferas permite mejorar significativamente la sensibilidad de los posicionamientos de las mismas en el espacio y tiempo. Realmente no se trabaja con todos los puntos de cada esfera, pues ese método sería muy sensible a defectos de forma de la esfera. Sino que por mínimos cuadrados, se integra la superficie de puntos que cada cámara recibe de cada esfera, para caracterizarla por la posición espacial y temporal de su centro. El método se hace mucho más robusto a brillos indeseados, a pérdida parcial de visión de la esfera por parte de cada cámara, etc. Exactamente la misma filosofía que se sigue en el diseño de los patrones de la máquinas de medir por coordenadas CMM, y más concretamente en los patrones de bolas y artefactos no calibrados.
Estrategia de medición: protocolo de evaluación
La colocación de los marcadores debe seguir protocolos estandarizados, ya sea en una aplicación sanitaria [8 a 12] o dentro del ámbito deportivo [13 a 19]. Se situan de forma que recogen los resaltes óseos que no varían ni se ven recubiertos por estructuras musculares o de tejidos blandos a la hora de la realización del movimiento. Ejemplo de estos marcadores de la colocación de estos marcadores son C-7, acrómeon, cabeza del peroné, EIAS, EIPS….
A veces, los equipos de análisis de la marcha se usan conjuntamente con otros equipos que nos dan más información del proceso. Por ejemplo, los más usados son las plataformas dinamométricas que permiten analizar la marcha conjugando aspectos de las cargas y fuerzas (cinemática).
Los protocolos que se desarrollan van orientados a obtener la siguiente información:
1.- Si se posee una amplitud adecuada o limitada en la ejecución de un movimiento.
2.- Las curvas obtenidas deben ser simétricas en los pacientes ante una repetición del movimiento en series.
3.- La velocidad de ejecución del movimiento
4.- La aceleración a la realización de movimientos
5.- La relación agonista-antagonista con las variables velocidad, aceleración y resistencia de tejidos blando.
6.- La coordinación de los movimientos y su sistema propioceptivo y articular.
7.- Movimientos complejos (marcha, deporte, técnica, ergonomía…)
Pero desde el mundo de la Metrología, simplemente consiste en definir lo que vamos a medir, en qué puntos nos vamos a fijar para caracterizar el mensurando. Lo que unos llaman protocolos de evaluación, nosotros lo denominamos estrategia de medición y características a medir.
Medición bruta: marcha del paciente y registro de datos
Se registra la posición en el tiempo de cada marcador. Con ello, y siguiendo las necesidades del sanitario, se determinan en el movimiento del sujeto, paciente o deportista::
1.- Los grados por segundo a los que se mueve una articulación, los cm por segundo que se mueve un segmento y las relaciones de ambos por el tiempo de ejecución del movimiento.
2.- Cuanta compensación se producen en movimiento puros (por ejemplo pronosupinación en la flexo extensión de codo)
3.- Las curvas de velocidad/tiempo. Que permiten conocer si hay “saltos” en el desarrollo del movimiento y por lo tanto detectar patrones patológicos o simulados (por ejemplo el simulador frena la finalización del movimiento en diferentes puntos del ROM, o bien, se producen también puntos de finalización y amplitudes diferentes cuando la patología está magnificada o simulada)
4.- Permiten analizar movimientos concretos en diferentes posiciones y obtener gráficas visuales de ejecución del movimiento.
Resumiendo, las variaciones de amplitud, velocidad y recorrido que se producen para las zonas de interés. Además en Salud, se dice que los equipos de captura de movimiento poseen errores de milímetros, a la hora de registrar amplitudes de metros, y de milésimas de segundo en aceleraciones de metros por segundo. ¿Quién y cómo se asegura?
Un metrólogo nunca se pararía ahí, un sanitario raramente da el salto. Metrológicamente, ya se ha obtenido la medida en bruto, que junto con la incertidumbre, dará la información completa a tener en cuenta en el diagnóstico o propuesta de mejora del rendimiento. Nosotros hemos dado un pequeño paso, no hemos calibrado el equipo, no hemos podido calcular la incertidumbre, pero hemos verificado el equipo y hemos acotado la incertidumbre. Hemos conseguido un procedimiento válido a utilizar, un procedimiento que ha demostrado ser útil sin comprometer el tiempo de uso del equipo.
Informe de medición: valoración funcional del paciente/deportista y diagnóstico
Con los resultados brutos de las mediciones, sin más cálculos, el sanitario habitualmente hace la valoración analítica de la función [20], con escalas que intentan aproximar datos de la función del sujeto a través de unos sencillos sistemas de evaluación, que presentan un elevado margen de error así como índices de subjetividad. Y son por lo tanto de un valor escaso al existir un amplio margen de error. ¡Se desconoce la fiabilidad de la medida!
Desde un punto de vista metrológico, esa fiabilidad de los diagnósticos es directamente proporcional a la calidad de las mediciones realizadas. Si además se considera que actualmente surge discrepancia entre los resultados obtenidos para determinadas magnitudes, según sea el equipo que lo ha determinado, ¿por qué no asegurar la trazabilidad mediante patrones y técnicas que ya existen?.
En el presente trabajo se presentan los resultados preliminares obtenidos en la implementación de técnicas de verificación y calibración al equipo de análisis de la marcha de la Escuela de fisioterapia, con procedimientos similares a los utilizados en la calibración de máquinas de tres coordenadas con artefactos no calibrados, tal y como se presentó en el 5º Congreso Español de Metrología, celebrado en Madrid en junio del 2013.
2. Metodología
Las máquinas de medición por coordenadas, son equipos que llevan mucho tiempo utilizándose en la industria. Su versatilidad y potencial para la programación de tareas complejas de medición, las han convertido en un instrumento ampliamente extendido. Acorde con esta versatilidad, la calibración y verificación de las mismas es una tarea compleja pero no por ello poco importante. De ahí que a nivel internacional y nacional existan documentos normativos ISO y UNE que recomiendan procesos y técnicas para la evaluación de la calidad de la medición [21 y 22]. Estas normas se desarrollan en el seno del comité de normalización ISO/TC 213/WG 10 y AEN/CTN 82/SC 2. Las series de normas que tratan estos equipos son las UNE/EN/ISO 10360-X e ISO/TS 15530-X.
El método empleado fue tan sencillo como aplicar las técnicas de calibración de máquinas de tres coordenadas con artefactos no calibrados a un equipo de análisis de la marcha, diseñando y fabricando el artefacto no calibrado y contando con el apoyo de un brazo de medición para el dimensionado del patrón.
3. Desarrollo/Descripción
3.1 Equipos utilizados.
a) un brazo de medición Faro Arm equipado con un láser para realizar mediciones sin contacto. El equipo se encuentra ubicado en la Escuela Técnica superior de Ingeniería de ICAI.
b) y el equipo de análisis de la marcha BTS, donde la medición se hace sin contacto y además permite la medición de la cuarta coordenada temporal, pues hace mediciones en continuo. El equipo se encuentra ubicado en la Escuela Universitaria de Enfermería y Fisioterapia “San Juan de Dios”, de la Universidad Pontificia Comillas de Madrid y ubicada en la localidad de Ciempozuelos.

La primera particularidad de este proyecto es la aparente disparidad de los equipos de medición, sin embargo desde nuestro punto de vista son tratados siempre como dos máquinas de medición por coordenadas, puesto que cumplen la definición dada en la norma.
Basándonos en que los dos equipos los entendemos como dos tridimensionales, pasaremos a denominarlas CMM1 (brazo de medición) y CMM2 (equipo de análisis de la marcha).
Las características técnicas de los equipos, de interés para el presente trabajo son:
a) CMM1 (brazo de medición):Volumen de medida de 0,5 m3 aproximadamente y resolución de 1 μm.
Este equipo se caracteriza por determinar las coordenadas espaciales del mensurando con respecto a la referencia (propia o configurada por el usuario), siempre dentro de su volumen de medición. Se trabajó en coordenadas cartesianas.
Si bien posee un patrón de bolas calibrado, no se puede asegurar su medición con una incertidumbre baja, dado que el laboratorio no cumple los requisitos necesarios asociados a vibraciones. Por ello, los resultados de este proyecto son cualitativos y no trazados. A esto hay que añadir que aún no se ha consensuado internacionalmente un procedimiento de calibración que se reconozca como válido para este tipo de instrumentos.
Así que el motivo por el que se utilizó este equipo en lugar de una CMM tradicional fue la sencillez en su manejo, el ser fácilmente transportable y manejable para las medidas que se buscaba realizar y suficientemente preciso para este estudio preliminar.
Su sistema de captación de la medida consiste en un cabezal láser solidario a uno de contacto, con una longitud de onda de 633 nm aproximadamente.

Con ello, siendo muy conservadores, se consideraron válidos los resultados dados por la CMM1 hasta las 100 μm aproximadamente.
b) CMM2 (equipo de análisis de la marcha):Volumen de medida de 6 m3 aproximadamente y resolución inferior a 0,5 mm en 3D.
Si bien en el manual del equipo se habla de la calibración del mismo mediante un artefacto proporcionado por el propio fabricante, ésta no cumple lo que habitualmente se utiliza en el entorno de la metrología, puesto que carece de trazabilidad. Se trata de un artefacto constituido por tres barras con esferas reflectantes a unas distancias fijas y pre-establecidas.
Profundizando en su utilización, realmente permiten realinear las cámaras y ajustar su sincronización en el momento de realizar la medida, pero no aseguran la trazabilidad.
No se ha considerado la plataforma dinamométrica en este estudio.
3.2 Consideraciones previas a la construcción del artefacto no calibrado.
En la ISO/TS 15530-6 [22], se observa la posibilidad de realizar calibraciones con piezas no calibradas para tareas especiales de medición. La idea que se implementó en nuestro proyecto fue la siguiente:
Si bien no se asegura el valor absoluto de las medidas sí permite la valoración relativa del comportamiento del sistema en la evaluación, incluyendo los algoritmos de cálculo.
Así, primeramente se desarrolló el procedimiento a realizar en la CMM1 [23].
El artefacto elegido para la elaboración del procedimiento fue una pieza sencilla con geometrías cilíndricas y cónicas (figura 3).

Se seleccionaron las direcciones más significativas sobre las que llevar a cabo las mediciones, con el fin de determinar la relevancia de su utilización en el procedimiento final.
En la figura 4 se muestran algunas de todas las posiciones que se consideraron.




Con este procedimiento, se simuló el multiposicionamiento del mismo mensurando con respecto a la CMM. Algo menos utilizado en las CMM tradicionales, pero claramente la situación habitual de trabajo en la CMM2.
Cada una de estas direcciones supuso la orientación de la pieza en las dos direcciones posibles. Y en cada posición se midieron al menos 10 veces los parámetros más significativos de la pieza, diámetro del cilindro de 37,92 mm y el de 20 mm.

La dispersión de los valores incluyó además de la variabilidad entre posiciones, posibles fuentes de incertidumbre como fueron la temperatura, deriva del equipo, etc. pero sin llegar a asegurarse la trazabilidad, de ahí el que la denominemos pseudo-incertidumbre.
Por tratarse de unos resultados tan esperanzadores, con dispersiones de tan sólo 20 µm, consideramos que la CMM1 es un equipo suficientemente preciso como para servir de “referencia” a la CMM2, donde la precisión que se necesita no va más allá de 1 mm.
Asimismo, se comprobó que para el orden de magnitud de los resultados que esperamos obtener, no es relevante la ubicación del artefacto no calibrado dentro del volumen de medición, por lo que nos limitamos a situar el nuevo artefacto no calibrado en dos direcciones que permitieran un acceso cómodo a todos los puntos de medición.
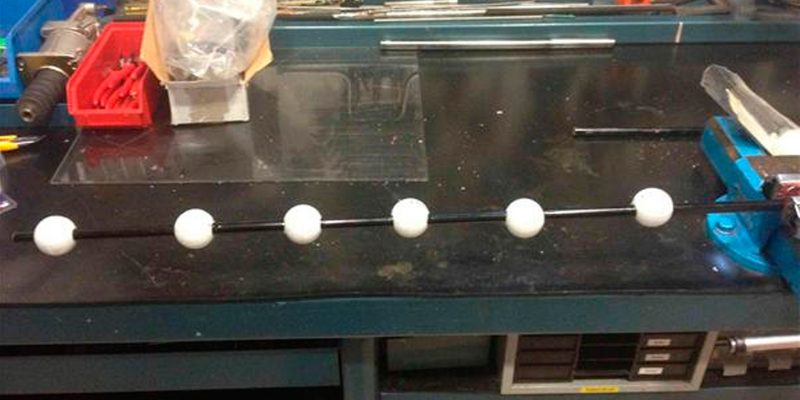
3.3 Artefacto no calibrado.
Se construyó un artefacto no calibrado, formado por 6 esferas y una barra rígida. Dichas esferas se fijaron a la barra asegurando así que su posición relativa no variaba. Las esferas fueron recubiertas de un material reflectante que permitiese su medición en la CMM2, y no impidiese su medición en la CMM1.

La barra de soporte sobre las que se montaron las esferas, se pintó de negro mate por no ser objeto de medición en ninguno de los dos equipos, y que no diera lugar a falsas mediciones por brillos indeseados.

Se recubrieron las esferas con material reflectante que permitiera hacerlas “visibles” a los sistemas de detección de las cámaras de los sistemas de análisis de la marcha y el brazo de medición, probando diferentes configuraciones con el fin de encontrar la más adecuada:


Las esferas tienen 30 mm de diámetro aproximadamente y una separación de entre 100 y 150 mm, variable intencionadamente en la barra, pero fija entre ellas.
Queda por lo tanto patente la semejanza de este artefacto con los patrones de bolas que se utilizan habitualmente en la calibración y verificación de CMM.
3.4 Proceso de medición en las CMM.
Se midió el artefacto en la CMM1, determinando la distancia entre centros de esferas y el diámetro de las mismas, en distintas posiciones.


Se midió el artefacto en movimiento en la CMM2, determinando también la distancia entre los centros de las esferas, en distintas posiciones también.

Figura 11: Mediciones en distintas configuraciones con el sistema de análisis de la marcha
4. Resultados y discusión
Los resultados fueron los siguientes:

Evidentemente los resultados obtenidos en la CMM2 tienen una incertidumbre mucho mayor, debido a que no es éste el objetivo de medición de los equipos. Pero sí muestra una correlación importante entre los resultados.

Se observa que el diseño del patrón es muy adecuado para la comparación y trazabilidad entre los equipos. Como línea futura de este proyecto, se desarrollará la línea de calibración de la CMM2, sin más que construir un patrón de más precisión a utilizar con los dos sistemas y con trazabilidad.
Conclusiones
Se ha aplicado la técnica de calibración de CMM’s en un equipo de análisis de la marcha. Esto permitirá asegurar la trazabilidad de los equipos de análisis de la marcha a patrones nacionales reconocidos. Asimismo permitirá la comparabilidad de resultados sobre un mismo sujeto realizado con equipos distintos.
Se asegurará así la calidad de las mediciones, y por tanto, un mejor diagnóstico o mejora del rendimiento en el deporte.
Una gran ventaja es la utilización de un patrón único en todos los equipos, lo que disminuirá la incertidumbre.
Entre las posibles líneas futuras no cubiertas con este trabajo estaría la incorporación de la electromiografía de superficie a los resultados de posición y ángulo, y las plataformas dinamométricas.
Referencias y bibliografía.
[1] Detección, rastreo y reconstrucción tridimensional de marcadores pasivos para análisis de movimiento humano. Cinemed III. Revista Ingeniería Biomédica ISSN 1909-9762, volumen 3, número 6, julio-diciembre 2009, págs. 56-67
[2] A Gait Analysis data collection and reduction technique. Roy B Davis, Sylvia Ounpuu, Dennis Tyburski, James R Gage. Human Movement Science 10 (1991) 575-587
[3] Yanxin Zhang and Simon M. Hsiang. A New Methodology for Three-dimensional Dynamic Analysis of Whole Body Movements. ISSN 1750-9823 (print) International Journal of Sports Science and Engineering Vol. 02 (2008) No. 02, pp. 87-93
[4] Biomecánica clínica de las patologías del aparato locomotor. Rodrigo C Miralles Marrero, Iris Miralles Rull Ed. McGraw Hill- 2007 – Página 20: 446 páginas
[5] Can the reliability of three-dimensional running kinematics be improved using functional joint methodology? Pohl MB, Lloyd C, Ferber R. Gait Posture. 2010 Aug 21.
[6] Ge Wua. Frans C.T. van der Helmb. H.E.J. (DirkJan) Veegerc. Mohsen Makhsouse. Peter Van Royf. Carolyn Angling. Jochem Nagelsh. Andrew R. Kardunai. Kevin McQuadej. Xuguang Wangk. Frederick W. Wernerl. Bryan Buchholzm, ISB recommendation on definitions of joint coordinate system of various joints for the reporting of human joint motion—part I: ankle, hip, and spine. Letter to the editor. Journal of Biomechanics 35 (2002) 543–548
[7] Ge Wua. Frans C.T. van der Helmb. H.E.J. (DirkJan) Veegerc. Mohsen Makhsouse. Peter Van Royf. Carolyn Angling. Jochem Nagelsh. Andrew R. Kardunai. Kevin McQuadej. Xuguang Wangk. Frederick W. Wernerl. Bryan Buchholzm, ISB recommendation on definitions of joint coordinate systems of various joints for the reporting of human joint motion—Part II: shoulder, elbow, wrist and hand. Journal of Biomechanics 38 (2005) 981–992
[8] La carrera de velocidad: metodología de análisis biomecánico. Amelia Ferro Sánchez. Ed Lib Deportivas Esteban Sanz, 2001 ISBN 848597780. Pag 24: 222.
[9] Valoración De La Discapacidad Física: El Indice De Barthel, Javier Cid-Ruzafa y Javier Damián-Moreno Rev. Esp. Salud Publica vol.71 n.2 Madrid Mar./Apr. 1997
[10] Músculos: pruebas y funciones. F.P. Kendall y col. Ed Jims, 1985 ISBN 847092270X. 325 páginas
[11] Kinesioterapia: Evaluaciones. Técnicas pasivas y activas del aparato locomotor. Principios. Miembros inferiores Volumen 1 de Kinesioterapia: Evaluaciones, técnicas pasivas y activas del aparato locomotor. I Principios, C. Génot,. Ed Editorial Médica Panamericana, 2005 ISBN 8479032472. 527 páginas
[12] Cid-Ruzafa J, Damián-Moreno J. Valoración De La Discapacidad Física: El Indice De Barthel, Rev. Esp. Salud Publica vol.71 n.2 Madrid Mar/Apr. 1997.
[13] Robb AJ, Fleisig G, Wilk K, Macrina L, Bolt B, Pajaczkowski J. Passive Ranges of Motion of the Hips and Their Relationship With Pitching Biomechanics and Ball Velocity in Professional Baseball Pitchers. Am J Sports Med. 2010 Aug 31
[14] López de Subijana C, Juárez D, Mallo J, Navarro E. Biomechanical analysis of the penalty-corner drag-flick of elite male and female hockey players. Sports Biomech. 2010 Jun;9(2):72-8.
[15] Ellenbecker TS, Ellenbecker GA, Roetert EP, Silva RT, Keuter G, Sperling F. Descriptive profile of hip rotation range of motion in elite tennis players and professional baseball pitchers. Am J Sports Med. 2007 Aug;35(8):1371-6.
[16] Laudner KG, Moore SD, Sipes RC, Meister K. Functional hip characteristics of baseball pitchers and position players. Am J Sports Med. 2010 Feb;38(2):383-7. Epub 2009 Oct 1.
[17] Dwelly PM, Tripp BL, Tripp PA, Eberman LE, Gorin S. J Athl Train. Glenohumeral rotational range of motion in collegiate overhead-throwing athletes during an athletic season. 2009 Nov-Dec;44(6):611-6.
[18] Corbi Soler F. Biomecánica de las técnicas deportivas y del entrenamiento. Lulu.com, 2008 ISBN 1409239136, pag 90: 198
[19] Gowitzke BA, Morris Milner. El cuerpo y sus movimientos: bases científicas. Paidotribo, 2000 ISBN 8480194189. Pag 304;342.
[20] Valoración de las discapacidades y del daño corporal: baremo internacional de invalideces
Autor Louis Mélennec. Ed. Elsevier España, 1996 ISBN 8445803999. Pag 188.
[21] ISO/TS 15530-6 Geometrical Product Specifications (GPS) Coordinate measuring machines (CMM): Techniques for determining the uncertainty of measurement Part 6: Uncertainty Assessment Using Un-Calibrated Work Pieces and a Multiple of Measurement Strategies
[22] ISO 10360-1: Geometrical product specifications (GPS) — Acceptance test and reverification test for coordinate measuring machines (CMM) Part 1: Terms and definitions
[23] Lorente R, Sáenz-Nuño M.A; Procedimiento de medición con la máquina “Brazo de Medición” a partir de piezas no calibradas, Proyecto fin de Carrera para la obtención del título de Ingeniero Técnico Industrial, especialidad Mecánica, Universidad Pontificia Comillas de Madrid, 2011.






Comentarios